Introduction
Anchor location and survey is critical to proper operation of the CUWB RTLS system. Users should take care to select locations for Anchors that provide good coverage to the area of interest as well good Line of Site (LoS) from Anchor-to-Anchor. Additionally, care should be taken during survey as errors in surveyed Anchor locations will translate to error in output location.
This document provides guidance to users regarding Anchor positioning and subsequent surveying of Anchors in the environment.
Prior to permanent installation it is recommended that users unfamiliar with the CUWB System first visit the Quick Start Guide for instructions on setting up a small manageable network. Setting up a small network allows users to familiarize with the system and avoid common issues during large network setup.
Planning
A good plan will go a long way in mitigating common issues with CUWB System setup. Planning will also help to achieve the best performance from the system. The following basic steps can be followed to create a good plan for the network layout:
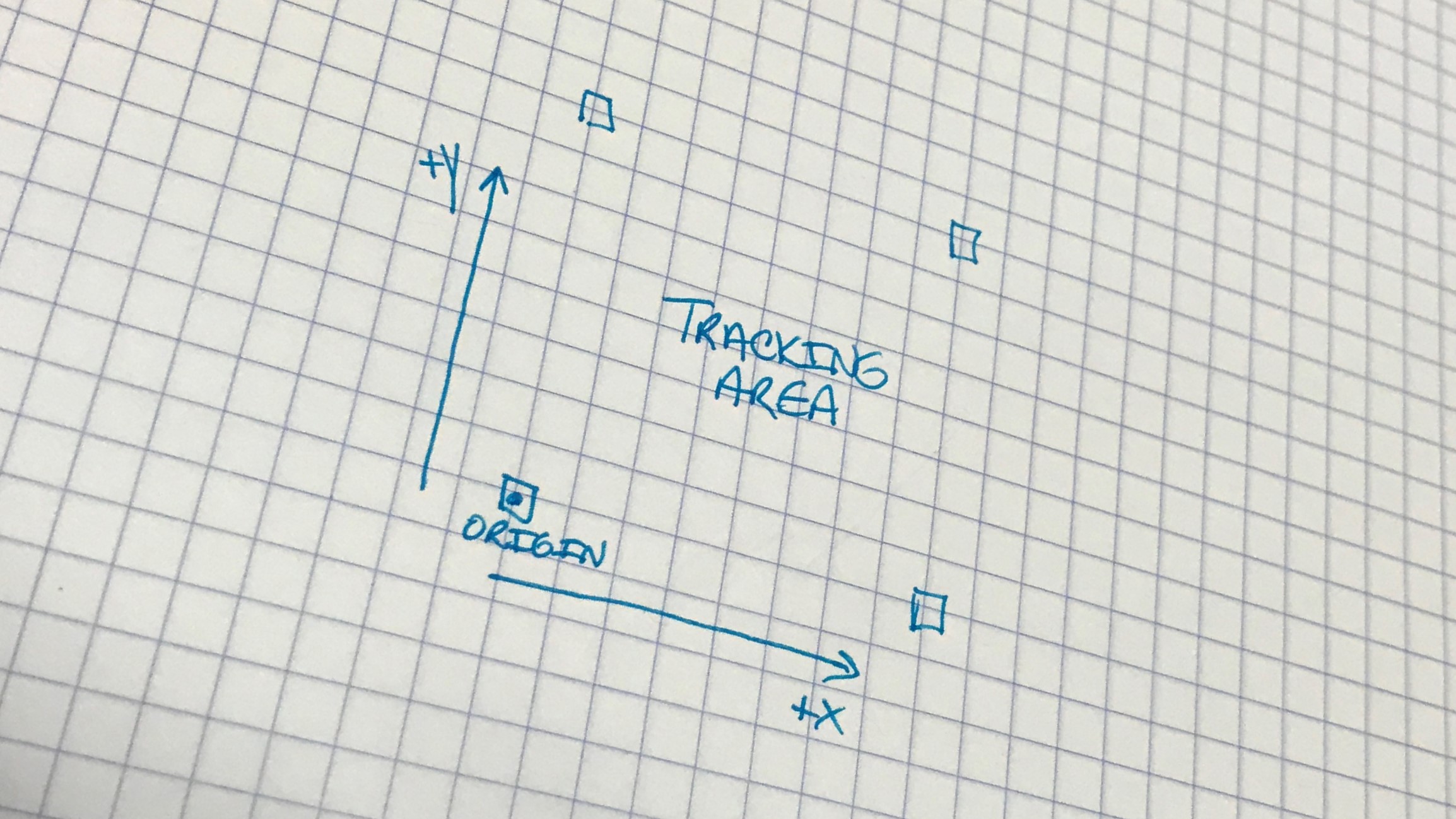
- Draw/Model the area of interest : Time should be taken to make a scale drawing of the tracking area. This can be done on graph paper taking quick measurements of the space, or through CAD modeling. Accuracy in this drawing is not as important as the creation of a visual reference for planning. Include walls and any significant obstructions found in the space.
- Add Anchors to the Model : Start adding points on the model that represent anchors. Add anchors around the edges of the space to ensure full coverage of the area. Then work in toward the center. Space anchors 10-15m apart for high precision, and ensure critical areas have the best coverage.
- Evaluate the Placement : Anchors should have good LoS to one another. LoS allows Anchors to share Global Network Time(GNT), ensuring network stability and enabling larger installations. Evaluate LoS by tracing lines between the Anchors on your model and check that each anchor has clear lines between itself and several other Anchors. The same evaluation should be done from the perspective of a Tag. In the tracking areas of interest, ensure that lines drawn from a Tag in the area to the Anchors are not obstructed by large objects.
- Tweak the Anchor Placement : Move the Anchors around the model based on observations made during the evaluation step above. Repeat these two steps optimizing the plan.
Placement Evaluation
The steps above describe evaluation of anchor placement in fairly simple terms. There are a lot of factors involved in ensuring that two UWB devices can communicate well with one another. The following sections provide guidance on evaluating the Anchor placement plan for best performance.
UWB Signal Performance
- Line-of-Site (LoS) : The CUWB system uses high frequency UWB RF signals. The nature of these signals is that they don’t penetrate well through material obstructions. Metallic objects, and object with high water content, will block the signal completely and should be avoided. UWB signals will pass through wood, MDF, and sheet rock, though these obstructions should be avoided as much as possible.
- Multi-Path : UWB can ‘bounce’ off of nearby objects. In general this is not an issue. However, in some circumstances the signals that take a non-direct path, or multi-path, can interfere with the primary signal. Anchors should not be placed in areas containing a lot of metallic objects. Also when mounting to metallic ceilings, such as drop ceiling grid, the anchors should be lowered to avoid bounce off the grid as the UWB signal travels between devices.
- Orientation : In general mounting of Anchors at different angles should be avoided. The antenna on the devices performs best when mounted in the same orientation.
- Below Horizon : DWETH111 and DWETH101 are designed to have good UWB performance facing out of the dome. The back plane of the device creates an UWB shadow where other devices cannot be heard. When placing DWETH Anchors avoid mounting orientations where the ‘back’ of the device is facing toward other UWB devices.
The above considerations should be made for RF performance from Anchor-to-Anchor as well as from Tag-to-Anchor.
Cable Considerations
DWETH111 and DWETH101 Anchors should be mounted and powered per specifications in their respective datasheets. When planning Anchor locations, thought should be given to cable routing and device mounting. The physical environment will often necessitate moving an Anchor from the desired location. Deviation from the planned installation can result in LoS occlusions even for small moves. Planning for Anchor cables and mounting can help avoid the need to move Anchor locations during installation.
RTLS Performance
Anchor positions set the base performance of the system. More Anchor coverage in an area will result in more precise location output. The following tips can help with planning for RTLS performance:
- Numbers : The CUWB Location algorithm requires Tag beacons to be received by at least four Anchors. This is the base requirement, beacon reception at more than four anchors improve the quality of the output location. The CUWB Location algorithm also implements ‘occlusion mitigation’ by weighting Anchor data based on signal quality. The occlusion mitigation algorithm works best with large numbers of Anchors. In general, it is recommended that a Tag beacon be heard by eight or more anchors for high precision output.
- Height Variation and Angular Diversity : Best performance is achieved when the CUWB Location algorithm has Angular Diversity between the Tag and the Anchors. For this reason, symmetry in installation should be avoided. Diversity can be also be achieved through varying heights of the anchors. For best Z-axis performance consider placing anchors at a variety of heights as well as placing anchors directly above the key areas of interest.
- Accurate Survey : The CUWB Location algorithm depends on accurate locations of the Anchors. Errors in Anchor location will translate directly into error in output positions. Additionally, in order to participate in GNT calculations the Anchors need to have accurate positions. Anchors will not lock on to GNT if they have an incorrect survey value.
Survey
 Accurate survey of installed Anchor positions ultimately determines the quality of the CUWB System location data. If the system is not provided with good XYZ coordinate data as input from the Anchors it will not produce good XYZ output. Anchors may also have trouble locking on to GNT given a bad survey.
Accurate survey of installed Anchor positions ultimately determines the quality of the CUWB System location data. If the system is not provided with good XYZ coordinate data as input from the Anchors it will not produce good XYZ output. Anchors may also have trouble locking on to GNT given a bad survey.
Survey can be done quickly and easily provided the proper tools. If one is available, it is highly recommended that users use a Total Station Theodolite for survey. However, it is possible to create an accurate survey using measurement tools such as a laser plumb bob and laser range finder.
Note: All measurements should be done in meters, or converted to meters prior to entry in the CUWB Manager.
Tips and Tricks
Following the pointers below will help to ensure an accurate survey:
- Record Serial Numbers : The serial numbers need to be entered into the CUWB Manager along with the XYZ data. It is easy to install devices and forget to record the serial numbers. Consider adding serial numbers to the system drawing prior to installation.
- Select Origin and Axes : Carefully choose an origin and axes for the Cartesian XYZ coordinates by considering how the XYZ data will be used and displayed. In selecting the origin find a location that can be easily measured. For example, placing the origin at the corner of a wall would provide a repeatable location to measure against. Choosing the plane of a wall as an axis is also advisable as it allows users to measure distances directly to the axis. The origin and axes should be clearly marked on the system drawing for reference.
- Reference Points : In addition to the origin and axis find objects in the environment that do not move and mark them as reference points. Measure to those objects and use them to help with survey. The points can be useful when it is not possible to measure directly to an axis. They may also be used as test locations to see that the CUWB system is generating accurate output data.
- Measure to the Antenna : Find a point on the Anchor device that can be easily measured and make a correction from that point to the antenna on the device. The DWETH111 and DWETH101 antenna location is noted relative the case in their respective datasheets.
- System Drawing : Use the system drawing to reference and record XYZ data as well as anchor serial numbers.
Performing a Manual Survey
Follow these steps to survey a system with a laser plumb bob and range finder:
- Choose a wall or grout line for both the X and Y axes.
- User the laser plumb to translate the center of the device from the ceiling to the floor. Place a piece of painters tape on the floor and mark the center of the device.
- Generate X measurements by using the range finder to measure from the point on the floor to the wall or grout line selected as the X-axis.
- Generate Y measurements by using the range finder to measure from the point on the floor to the wall or grout line selected as the Y-axis.
- Generate Z measurements by using the range finder to measure from the point on the floor to the center of the device on the ceiling. Note: don’t forget to correct for the antenna height within the case
- Repeat steps 2 through 5 above for all Anchors in the system.
CUWB System Links
These links provide further information regarding Bernoulli CUWB System setup and operation:
- For CUWB System installation and usage instruction check out the CUWB Manager Manual
- For CUWB Viewer installation and usage please visit the CUWB Viewer Manual
- Learn how to log CUWB Network data using the CDP Logger
- Visit the Software Downloads to get access to binaries and installation packages
Please visit the following links for more information and documentation regarding Ciholas UWB systems and products:
- Documentation, installation, and usage instructions visit CUWB.io
- To purchase Ciholas UWB products, please visit the Ciholas Shop
- Ask other users questions and find community information in the Community Forum
- Learn more about Ciholas services at www.ciholas.com